Enabling the Migration to Software-Defined Platforms for Critical Infrastructure
Paul Parkinson Director, Field Engineering, Aerospace & Defense, EMEA
EXECUTIVE SUMMARY
Embedded systems used in critical infrastructure are currently undergoing a dramatic evolution. Historically, they had varying levels of network connectivity, performed fixed functions, and may have undergone manual software updates in the field as part of long in-service lifetimes. Now the advent of ubiquitous network connectivity has accelerated innovation of embedded systems for the intelligent edge. This has driven demand for enhanced application capabilities that perform traditional automation and control functions while adding greater intelligence.
There is a growing need across multiple sectors for devices to be able to support the greater intelligence required to transition from automated to autonomous systems. This is driving technical requirements for open standards–based software-defined architectures to enable consolidation of multiple applications, including those at different levels of criticality and using multiple operating systems, onto common computing platforms. This approach enables application migration, portability, and interoperability, to avoid being locked into proprietary architectures.
Wind River® Helix™ Virtualization Platform addresses these common require- ments by providing a flexible virtualization platform that supports open stan- dards–based software-defined architectures. It is based on proven software technologies, enabling it to meet the safety certification requirements of aero- space, automotive, defense, industrial, and medical markets.
EVOLUTION OF EMBEDDED SYSTEMS FROM AUTOMATION TOWARD AUTONOMY
Over the last decade, embedded systems have undergone a continual evolution in terms of performance, connectivity, and capability. Historically, at one end of the capability continuum, some embedded devices have performed fixed functions and had long in-service deployment lifetimes. They may have rarely undergone system upgrades that added new functionality or deployed security updates to address the latest security vulnerabilities. Systems without any network connectivity may have needed manual updates in the field — a potentially time-consuming, error-prone, and expensive process, depending on the number of devices deployed and level of difficulty of physical access.
Processor performance has increased dramatically for many years, per Moore’s Law, and the cost of network connectivity has continued to fall, resulting in a dramatic increase in edge device connectivity. This has accelerated innovation, enabling new application functionality to be deployed more rapidly to edge devices using secure communications sessions over network infrastructure. This foundation is now enabling the development and deployment of the next generation of intelligent devices and the transition from automation to autonomy.
Aerospace and Defense Sector
In the aerospace sector, there has been a very significant trend in avionics design, with a marked shift away from federated avionics architectures using fixed-function line-replaceable units (LRUs) to integrated modular avionics (IMA) architectures employing common computing platforms hosting multiple applications at different levels of safety criticality. This transition has been driven in commercial and defense aerospace by a common requirement to significantly reduce the overall size, weight, and power (SWaP) requirements of avionics systems, particularly as the number of federated LRUs has increased to support new avionics functions. The adoption of IMA has resulted in significant reduction in weight, enabling aircraft to fly with reduced fuel load or with more passengers or payload, respectively. The use of standards-based IMA software architectures to enable interoperability and integration has also had a significant positive impact on both commercial and military programs, reducing the risk of design lock-in, driving innovation, and reducing whole-life costs.
Automotive Sector
The automotive sector has its own set of challenges, due to the pressures of an extremely competitive market and the increasing rate of innovation. This is being driven by market demand for enhanced in-vehicle infotainment systems (IVI), over-the-air (OTA) updates, advanced driver assist systems (ADAS), and, more recently, the goal of autonomous driving. This has resulted in a dramatic increase in the number of processors used in automotive vehicles in the last decade. The deployment of autonomous driving systems will require further significant increases in on-board computing power, including general-purpose graphics processing units (GPGPUs), in order to support artificial intelligence (AI) and machine learning (ML) applications. These automotive systems, along with the associated cabling, have increased the weight of vehicles, which has had a negative effect on vehicle performance, fuel economy, CO2 emissions, and cost (just as in the aerospace market). As a result, major automotive manufacturers are now using common embedded computing platforms to consolidate applications and reduce SWaP.
Industrial Sector
In the industrial sector, companies are embracing digital transformation, using the Industrial Internet of Things (IIoT) and Industry 4.0 to address business challenges and remain competitive. Smart factories, energy systems, and other critical infrastructure are adopting real-time monitoring capabilities and analytics to measure operational efficiency and are now able to use analytics and predictive maintenance to minimize downtime due to system failures. This digital transformation is due to the addition of network-enabled monitoring capabilities to real-time control systems. Companies are now looking to achieve further efficiencies through workload consolidation on common computing platforms and remote upgrade capabilities.
Medical Sector
The medical sector is currently undergoing a revolution in healthcare, as new technologies are enabling advanced imaging systems, surgical robots, and other critical medical devices. Patient safety is life critical, so these systems have to operate safely, securely, and reliably. Current cybersecurity regulations mean that medical device manufacturers must be able to easily update their systems over the air; manual updates would not be cost-effective due to the large number of devices and the distributed install base.
COMMON MARKET REQUIREMENTS LEADING TO A CONVERGED EMBEDDED VIRTUALIZATION PLATFORM
Although each vertical market faces unique challenges and requirements, at an abstract level there are now similar and even common fundamental capabilities needed in embedded software platforms. In particular, all vertical markets need a safe, secure, and reliable platform with the same high-level requirements:
- Mixed criticality: A common requirement for a consolidation platform is to host both critical real-time control applications and general-purpose applications. It must isolate safety components and reduce their dependencies on the rest of the platform in order to ensure that the safety-certification costs of the overall platform remain affordable.
- Open standards: There is an increasing requirement for each sector to adopt open standards to enable application migration and portability as well as competition, and to prevent design lock-in. The commercial aerospace sector has embraced the ARINC 653 standard for open avionics architectures, while the U.S. government has adopted the Modular Open Systems Approach (MOSA). The Future Airborne Capability Environment (FACE™) technical standard provides an open avionics architecture for military avionics and uses commercial open standards (ARINC 653, POSIX®). The automotive sector is adopting Adaptive AUTOSAR (Automotive Open System Architecture) to enable greater adoption of commercial off-the-shelf (COTS) hardware and software and to provide a flexible and scalable framework. In the industrial sector, the Open Process Automation™ Forum (OPAF) is focused on developing a secure, open standards–based, interoperable process control architecture.
- Reuse and scalability: Intellectual property and previously developed (even previously certified) applications should be reusable on new embedded computing platforms. This includes using the performance and scalability provided by multi-core processor architectures with hardware virtualization support, while managing and isolating the application developer from the complexity of the underlying hardware architecture. It also requires the ability to deploy new applications on the platform to deliver additional capabilities.
- Security: There is an increasing need to ensure security throughout every phase of the operations and lifecycle of a device. This includes design, production, commissioning, deployment, and operation through to decommissioning at the end of the lifecycle. During deployment, the device needs to operate securely in different phases: It needs to perform secure initialization to verify the integrity of the deployed software, to ensure that it is has not become corrupted or tampered with; it needs to provide secure communications during operations and resilience against cyberattacks; and it needs to securely store sensitive data in process and data at rest, including when powered down.
- Support for modern development methods: Manufacturers in each of the vertical markets are under pressure to deliver new, high-quality software capabilities within shorter timescales. Many companies now use agile development processes to accelerate change while employing continuous integration and continuous delivery approaches through automation to dramatically reduce their integration and delivery timescale, as part of a DevOps culture to increase responsiveness.
EVOLUTION OF EMBEDDED VIRTUALIZATION FOR CRITICAL INFRASTRUCTURE
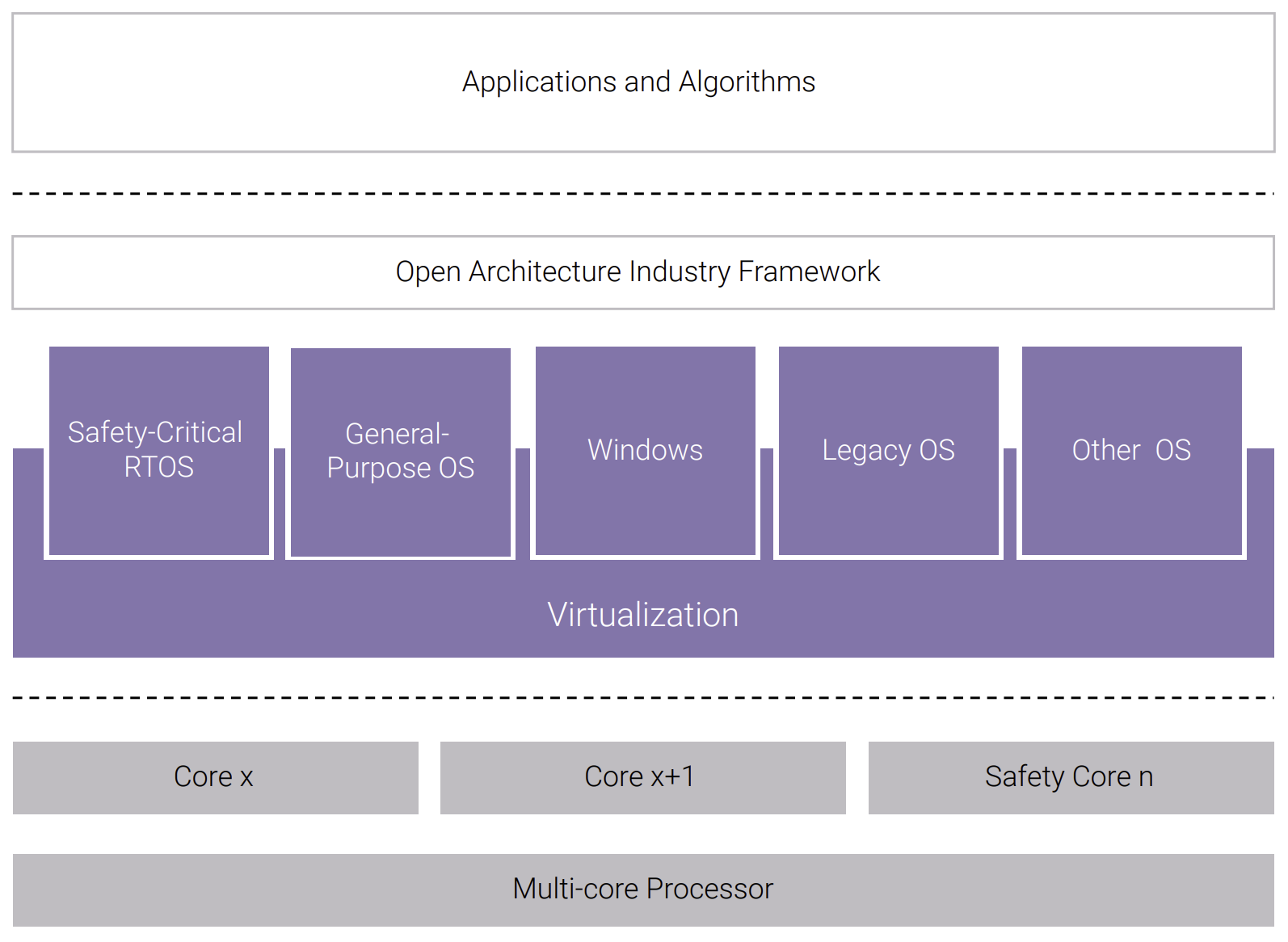
During the last decade, advances in processor technologies have had a significant impact on deployed architectures; in particular, the evolution and maturity of processor hardware virtualization support has enabled enterprise and cloud computing platforms to host virtualized applications efficiently and at scale. Hardware virtualization support has also been successfully deployed in embedded systems, particularly in safety-critical avionics systems using VxWorks® 653 Multicore Edition, where multiple virtualized applications can be hosted on a common avionics computing platform. This convergence across multiple sectors of hardware virtualization, multi-core processor architecture, and open standards–based software-defined architecture provides the opportunity for a common embedded virtualization platform for critical infrastructure. (See Figure 1.)
Wind River has addressed this market need by leveraging decades of experience and continuing industry leadership in safety-critical, security, and embedded hypervisor software technologies to develop Helix Platform.
Hypervisors and Virtual Machines
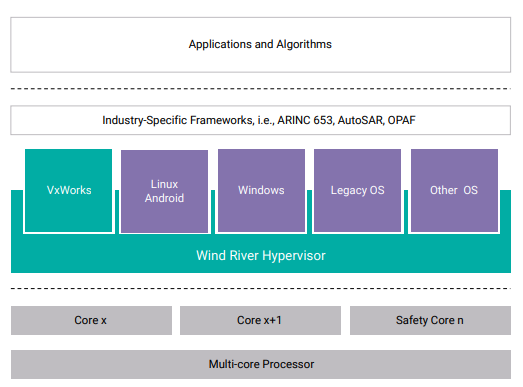
Helix Platform uses a Type 1 hypervisor (also known as a bare metal hypervisor), as shown in Figure 2, which runs directly on the processor; provides near-native real-time performance using direct interrupts; and provides the scalability, determinism, and small footprint suitable for safety certification. This approach contrasts with Type 2 hypervisors that focus on abstraction from the underlying physical environment and provides a best-effort performance that is not suitable for hard real-time applications. Additionally, the footprint is too large to undergo safety certification. The Type 1 hypervisor approach provides efficient scalability on multi-core processor architectures, since it can scale to a higher number of cores compared to traditional monolithic and micro-kernel architectures.
The hypervisor uses the processor’s dedicated hypervisor privilege level and full hardware virtualization support, enabling 32-bit and 64-bit guest operating systems and associated applications to run at separate privilege levels inside virtualized environments (commonly known as virtual machines). This includes VxWorks, Wind River Linux, Microsoft® Windows® (64 bit), Android, bare metal, and thirdparty operating systems including other flavors of Linux.
The hypervisor also uses the processor’s memory management unit (MMU) to enforce isolation of individual virtual machines. This prevents a guest operating system (OS) and its associated application from making any unauthorized programmed I/O accesses to another virtual machine or privileged system resource; any attempted unauthorized accesses are reported to the hypervisor.
Many modern processors additionally provide direct memory access (DMA) engines to perform efficient transfers of blocks of data between source and destination memory locations, for example between system memory and external I/O devices such as network interfaces. The hypervisor also uses another processor hardware resource, the IOMMU, to ensure that the guest operating system and applications only perform DMA transfers between authorized source and destination addresses. This means that Helix Platform is able to host a virtual machine containing a guest operating system that uses a third-party device driver of unknown pedigree, in the knowledge that an unauthorized DMA access will be detected and prevented by the IOMMU. This isolation capability provides benefits in terms of safety and security, and it supports the consolidation of multiple applications onto a common embedded processing platform.
These hardware virtualization and isolation capabilities enable Helix Platform to host real-time and safety-critical VxWorks applications alongside embedded Linux applications and general-purpose operating systems, such as Microsoft Windows and other third-party and legacy operating systems. This enables previously developed software to be rehosted, preserving investment in existing intellectual property and serving as an asset bridge between existing deployed systems and next-generation systems, thereby reducing the technical risk when upgrading in-service systems.
Inter-partition Communication
A consolidation platform also needs to support communication between individual virtual machines, and Helix Platform provides a number of different inter-partition communication methods:
- Shared memory and VNICs (Virtual Network Interface Controllers) enable communication between VxWorks, Linux, and Windows guest operating systems as well as other third-party guest operating systems.
- Safe IPC is a controlled shared memory implementation to enable communication among multiple guest operating systems (including VxWorks and Wind River Linux), potentially running at different levels of criticality.
Build-Time Configuration
Helix Platform builds on the capabilities of Wind River safe and secure platforms, which have a world-class certification track record under multiple certification standards across different industry sectors. Helix Platform has also evolved the proven code base to support a broader range of use cases by enabling support for a broader range of guest OS environments.
Build-time configuration involves the allocation of system resources to guest OS environments at system configuration and build time, and it enables the resources to be utilized in a predictable and deterministic manner at runtime, which is essential for safety-critical systems. The robust partitioning described earlier means that this configuration can support multiple safety-critical applications running in different partitions, or mixed-criticality systems comprising multiple applications at different integrity levels. The Independent Build Link and Load (IBLL) approach pioneered by Wind River in VxWorks 653 enables applications to be configured and built, linked, and loaded independently. This enables individual applications to be updated independently through the platform lifecycle without impacting other components, enabling incremental certification and dramatically reducing whole-life costs for the platform.
Scheduling
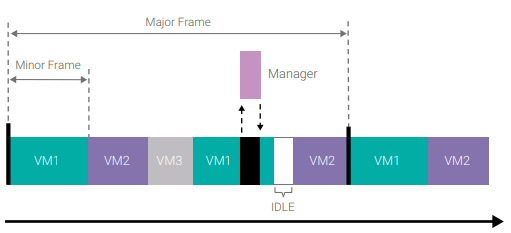
Helix Platform also supports flexible scheduling in order to support a broad range of application use cases. The Frame Scheduler uses a system schedule of multiple individual time slots of fixed durations that define how long individual guest operating systems and their associated applications can execute. The Frame Scheduler can be used to ensure that a general-purpose application does not overrun its allocation time period and adversely impact the execution of a safety-critical application hosted on the same platform (as shown in Figure 3).
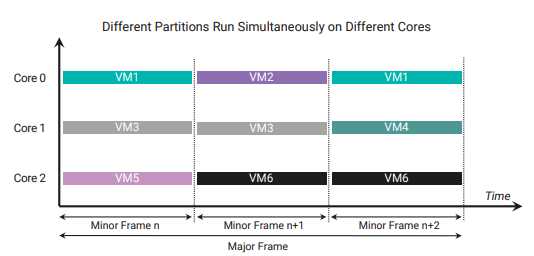
Helix Platform also allows the schedules for individual cores to be synchronized, enabling different partitions to run simultaneously on different cores and providing time partitioning so that a partition containing a virtual machine (VM) or guest cannot steal execution time from another VM (see Figure 4).
The Frame Scheduler also enables multiple schedules to be defined at system configuration and build time, and it allows the transition from one schedule to another through use of a dedicated hypervisor call, known as a hypercall, by a trusted guest OS partition. This support for multiple schedules enables use of different operational modes, e.g., initialization mode, operational mode, maintenance and/or diagnostic mode.
The frame scheduling model is widely used in safety-critical avionics systems (and the Helix Platform multi-core implementation is conformant with ARINC 653 specification1 ), but this approach is also equally applicable to safety-critical systems in other market sectors needing to host general-purpose and safety-critical applications on the same computing platform.
Health-Monitoring Framework
A system containing multiple heterogeneous virtual machines needs to be able to monitor, detect, and recover from hardware faults, guest operating system faults within individual virtual machines, and application failures. This requires that a health-monitoring framework be able to isolate faults and prevent failures from propagating. Although these requirements may appear to be straightforward conceptually, they are actually complex and require a sophisticated system-wide implementation to provide continued availability of the platform. Wind River has a proven track record in developing an ARINC 653 health-monitoring (HM) framework for safety-critical IMA applications and has used this expertise in the development of the health-monitoring framework for Helix Platform.
The HM framework handles events that can be either an alarm, representing a fault that needs attention, or a message, providing a notification that can be processed or recorded. The HM framework uses a hierarchical, table-driven implementation, which enables HM events to be handled at the application level, virtual machine level, or embedded platform level (these are referred to as the process level, partition level, and module level in the aerospace sector). The HM framework also allows HM events to be handled at the level at which they occur or are passed to the next level; e.g., a fault within an individual virtual machine is contained, and the error handling can be routed from the virtual machine’s guest operating system to the hypervisor. This approach enables the system integrator to determine, at the time of system configuration, the course of action to take in the event of specific errors. The HM framework also provides support for cold and warm restarts at the virtual machine and embedded platform levels. This enables individual virtual machines to be restarted without interfering with other virtual machines.
DEVELOPMENT TOOLS TO ENABLE DIGITAL TRANSFORMATION
An embedded virtualization platform promises many benefits. To fulfill these promises, sophisticated development toolset support is needed to manage the complexity of system configuration and the building and development of applications for heterogeneous runtime environments.
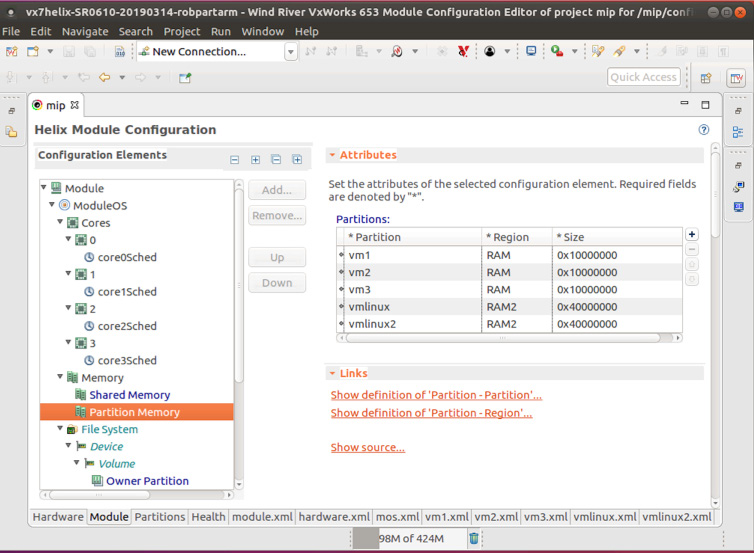
Wind River has a proven track record in the development of integrated development environments, dynamic visualization tools, and simulation platforms for general-purpose and safety-critical applications. This expertise has resulted in the latest Wind River Workbench (see Figure 5) development environment for Helix Platform, which provides graphical support for system definition and configuration, including allocation of virtual machines to processor cores, and definition of schedules. Wind River Workbench performs continuous validation of system configuration in the background, providing feedback to developers as they configure their systems. It also automates many of the build and configuration steps, reducing the burden on the system integrator and application developer (see Figure 5).
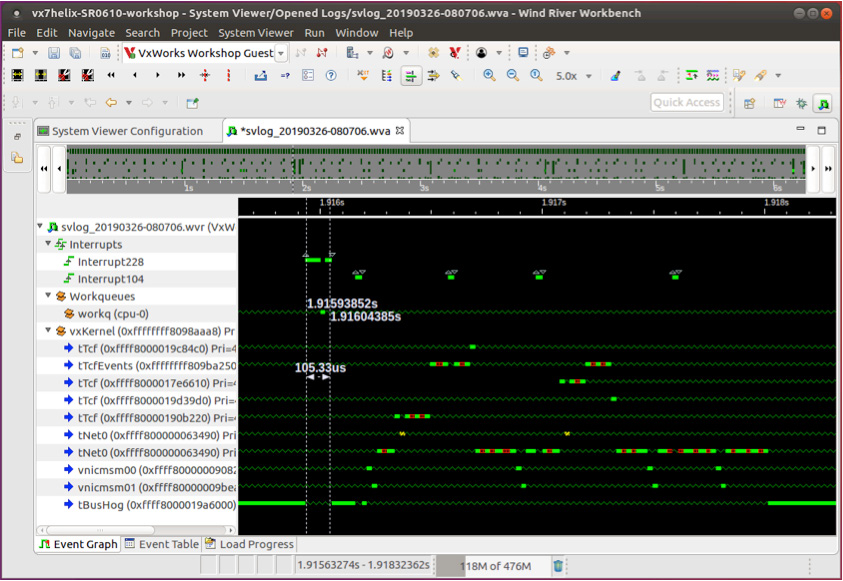
The patented Wind River System Viewer also provides graphical representation of the system, enabling the developer to view and understand the interaction between system events such as interrupts, guest operating system primitives, VxWorks application tasks, POSIX threads, or ARINC 653 processes (see Figure 6).
Helix Platform also uses the modern Clang/LLVM compiler toolchain. This provides multiple benefits, including support for the latest C and C++ language standards and performance benefits, such as fast compilation times, low memory usage, and faster execution from increased code optimization.
Applications can be developed using Helix Platform on an embedded target platform or using Wind River Simics®. Simics breaks the dependency on hardware availability and enables virtual prototyping to be undertaken earlier in the development lifecycle, reducing costly rework in later stages. One of the many capabilities of Wind River Studio, the first cloud-native platform for development of mission-critical intelligent edge systems, is the ability to run Simics containers in the cloud. Simics also enables many test cases to be run in parallel and at scale, supporting the development of applications for Helix Platform using continuous integration/continuous delivery (CI/CD).
CONCLUSION
Legacy embedded systems are facing significant challenges in terms of functionality, maintainability, and obsolescence. Future systems have demanding requirements in terms of softwaredefined architectures and open standards support. And critical infrastructure systems increasingly need to meet stringent safety certification requirements in their respective vertical markets.
Helix Platform addresses these challenges by providing an embedded virtualization platform that can act as an asset bridge, enabling the consolidation of legacy applications and previously developed intellectual property on a modern, scalable platform. It supports the development of new applications based on open standards using a diverse range of operating environments. It also provides flexibility through static and dynamic configuration options, enabling a broad range of use cases with mixed criticality to be hosted and deployed using modern development methods and processes.
For more information on Helix Platform, visit www.windriver.com/products/helix.